



Automatic program control system of electric drive for rotary table is considered. Automatic control is produced by programming logic controller
Automation, Programming Logic Controller, Control Systems
Целью работы является автоматизация управления электроприводом поворотного стола.
Для реализации этой цели необходимо решить следующие задачи:
- провести анализ электропривода поворотного стола [1];
- предложить техническое решение для автоматизации управления электроприводом поворотного стола [2];
- разработать программу для программируемого логического контроллера [3].
При автоматизации управления электроприводом поворотного стола достигается сокращение времени на выполнение технологических операций, а также облегчает труд оператора оборудования.
Из этого следует вывод, что задача автоматизации управления электроприводом поворотного стола достаточно актуальна.
На рисунке 1 показан внешний вид механизма поворотного стола.
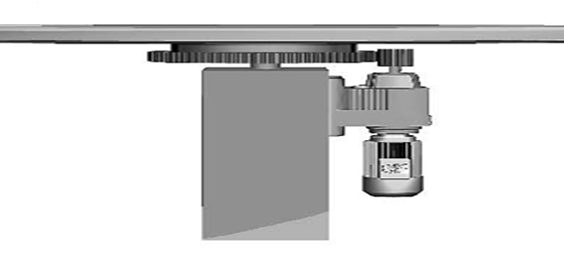
Рисунок 1 - Внешний вид поворотного стола
Основные узлы механизма поворотного стола:
- поворотная платформа (сверху);
- зубчатый редуктор (под поворотной платформой);
- основание (снизу по центру);
- электропривод (справа);
- система управления.
Функциональная схема управления механизмом поворотного стола показана на рисунке 2.

Рисунок 2 - Функциональная схема управления механизмом поворотного стола
Заключение:
- Проведен анализ конструкции электропривода поворотного стола.
- Предложено техническое решение для автоматизации управления электроприводом поворотного стола.
- Разработана программа для программируемого логического контроллера.
1. Sokolovskiy, G.G. Elektroprivody peremennogo toka s chastotnym regulirovaniem: Uchebnik dlya stud. vyssh. ucheb. zavedeniy / G. G. Sokolovskiy. – M.: Izdatel'skiy centr "Akademiya", 2006. – 272 s.
2. Terehov, V.M. Sistemy upravleniya elektroprivodov: Uchebnik dlya stud. vyssh. ucheb. zavedeniy / V. M. Terehov, O. I. Osipov; Pod red. V. M. Terehova. – M.: Izdatel'skiy centr "Akademiya", 2005. – 304 s.
3. Rukovodstvo po programmirovaniyu FC-302.- Moskva, 2010. 207 s.